Đồ án, luận văn, do an, luan van
Thư viện đồ án, luận văn, tiểu luận, luận án tốt nghiệp, thạc sĩ, tiến sĩ, cao học

 Đồ án Xây dựng phần mềm hướng đối tượng
Đồ án Xây dựng phần mềm hướng đối tượngMột thư viện cần quản lý việc đăng ký, mượn và trả sách của các bạn đọc thư viện. Sau đây là phần mô tả theo các nghiệp vụ hàng ngày của thư viện: Thủ thư gọi sách là đầu sách (dausach). Mỗi đầu sách có một ISBN để phân biệt với các đầu sách khác. Các đầu sách có cùng tựa (tuasach) sẽ có ISBN khác nhau nếu chúng được dịch ra nhiều thứ tiếng (ngonn...
 45 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 1700 | Lượt tải: 0
45 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 1700 | Lượt tải: 0 Luận văn Ứng dụng phần mềm PAL – El để khoan mạch in
Luận văn Ứng dụng phần mềm PAL – El để khoan mạch inHệ thống điều khiển máy khoan bằng máy tính điện tử là một tập hợp các thiết bị và phụ kiện liên quan. Để nắm được hết các nguyên lý hoạt động và cấu tạo của chúng rõ ràng là một vệc không đơn giản. Thậm chí ngay cả tên gọi của một số bộ phận trong hệ thống cũng gây phiền hà cho người sử dụng. Trước những tiến bộ như vũ bảo của ngành công nghiệp ng...
91 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 1927 | Lượt tải: 0 Khảo sát sự ổn định của hệ thống
Khảo sát sự ổn định của hệ thống· Hệ thống ổn định ở trạng thái hở, sẽ ổn định ở trạng thái kín nếu biểu đồ Nyquist không bao điểm (-1+i0) trên mặt phẳng phức. · Hệ thống không ổn định ở trạng thái hở, sẽ ổn định ở trạng thái kín nếu biểu đồ Nyquist bao điểm (-1+i0)p lần ngược chiều kim đồng hồ (p là số cực GH nằm ở phải mặt phẳng phức).
22 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 2369 | Lượt tải: 1 Nhóm lệnh về quỹ đạo nghiệm (roots locus)
Nhóm lệnh về quỹ đạo nghiệm (roots locus)Lệnh pzmap vẽ biểu đồ cực-zero của hệ LTI. Đối với hệ SISO thì các cực và zero của hàmtruyền được vẽ. Nếu bỏ qua các đối số ngõ ra thì lệnh pzmap sẽ vẽ ra biều đồ cực-zero trên màn hình. pzmap là phương tiện tìm ra các cực và zero tuyền đạt của hệ MIMO. pzmap(a,b,c,d) vẽ các cực và zero của hệ không gian trạng thái trong mặt phẳng phức. Đối vớ...
18 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 3128 | Lượt tải: 0 Vẽ giản đồ bode, nyquist, nichols
Vẽ giản đồ bode, nyquist, nicholsGiản đồ Bode gồm hai đồ thị: Đồ thị logarith biên độ của hàm truyền và góc pha theo logarith tần số. (một đơn vị ở trục hoành gọi là một decade). Biên độ : G(j)dB = 20 log10 G(j) (2.22) Pha : = G(j) (hay arg G(j)) (2.23) Giản đồ Bode của các khâu cơ bản:
25 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 7353 | Lượt tải: 1 Nhóm lệnh về đáp ứng tần số (frequency response)
Nhóm lệnh về đáp ứng tần số (frequency response)Tìm và vẽ đáp ứng tần số giản đồ Bode. b) Cú pháp: [mag,phase,w] = bode(a,b,c,d) [mag,phase,w] = bode(a,b,c,d,iu) [mag,phase,w] = bode(a,b,c,d,iu,w) [mag,phase,w] = bode(num,den) [mag,phase,w] = bode(num,den,w)
68 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 1969 | Lượt tải: 0 Nhóm lệnh về chuyển đổi mô hình (model conversion)
Nhóm lệnh về chuyển đổi mô hình (model conversion)) Công dụng: Chuyển đổi mô hình từ liên tục sang gián đoạn. b) Cú pháp: [ad,bd] = c2d(a,b,Ts) c) Giải thích: c2d và c2dt chuyển mô hình không gian trạng thái từ liên tục sang gián đoạn thừa nhận khâu giữ bậc 0 ở ngỏ vào. c2dt cũng có khoảng thời gian trễ ở ngõ vào. [ad, bd] = c2d(a,b,Ts) chuyển hệ không trạng thái liên tục x = Ax + Bu thà...
21 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 1901 | Lượt tải: 0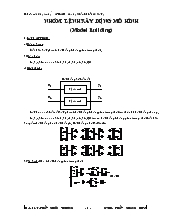 Nhóm lệnh xây dựng mô hình (model building)
Nhóm lệnh xây dựng mô hình (model building)) Công dụng: Kết hợp động học 2 hệ thống không gian trạng thái. b) Cú pháp: [a,b,c,d] = append(a1,b1,c1,d1,a2,b2,c2,d2) c) Giải thích:
36 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 1732 | Lượt tải: 0 Nhóm lệnh về đặc điểm mô hình (model properties)
Nhóm lệnh về đặc điểm mô hình (model properties)a) Công dụng: (Purpose) Tìm đáp ứng hiệp phương sai đối với nhiễu trắng (white noise). b) Cú pháp: (Syntax) [P,Q]= covar(a,b,c,d,w) P = covar(num,den,w) [P, Q]= dcovar(a,b,c,d,w) P = dcovar(num,den,w)
11 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 1783 | Lượt tải: 0 Đề tài Khảo sát ứng dụng MATLAB trong điều khiển tự động
Đề tài Khảo sát ứng dụng MATLAB trong điều khiển tự độngChú ý: Các lệnh đều viết bằng chữ thường, nhưng vì tác giả muốn viết hoa để người xem tiện theo dõi. 1. Lệnh ANS a) Công dụng: (Purpose) Là biến chứa kết quả mặc định. b) Giải thích: (Description) Khi thực hiện một lệnh nào đó mà chưa có biến chứa kết quả, thì MATLAB lấy biến Ans làm biến chứa kết quả đó.
99 trang | Chia sẻ: vietpd | Ngày: 22/08/2013 | Lượt xem: 1956 | Lượt tải: 3

